|
Smart Car Controller
1.0
Library to manage a two wheeled robotic vehicle (DC Motors)
|
|
Smart Car Controller
1.0
Library to manage a two wheeled robotic vehicle (DC Motors)
|
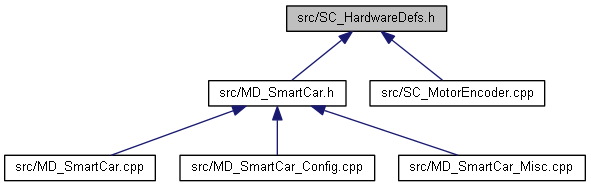
Header file for MD_SmartCar library hardware related parameters. More...
Variables | |
| const uint8_t | MC_INA1_PIN = 6 |
| Motor A Mode pin 1 - simple digital pin. | |
| const uint8_t | MC_INA2_PIN = 7 |
| Motor A Mode pin 2 - simple digital pin. | |
| const uint8_t | MC_ENA_PIN = 10 |
| Motor A output enable - PWM capable pin (L29x type only) | |
| const uint8_t | MC_INB1_PIN = 4 |
| Motor B Mode pin 1 - simple digital pin. | |
| const uint8_t | MC_INB2_PIN = 5 |
| Motor B Mode pin 2 - simple digital pin. | |
| const uint8_t | MC_ENB_PIN = 9 |
| Motor B output enable - PWM capable pin (L29x type only) | |
| const uint8_t | MC_PWM_MIN = 40 |
| Minimum PWM that will turn the motor. | |
| const uint8_t | MC_PWM_MAX = 255 |
| Maximum PWM. | |
| const uint8_t | MC_PWM_MOVE = 40 |
| Slow move() speed PWM default value. | |
| const uint8_t | MC_PWM_KICKER = 60 |
| Kicker for drive() to overcome static friction from standing start. | |
| const uint8_t | MC_KICKER_ACTIVE = 100 |
| Kicker active time in milliseconds. | |
| const float | MC_SPIN_ADJUST = 0.75 |
| Inertial adjustment for spin() operation. | |
| const uint8_t | EN_L_PIN = 3 |
| Left Motor encoder interrupt pin. | |
| const uint8_t | EN_R_PIN = 2 |
| Right Motor encoder interrupt pin. | |
| const float | DefKp = 1.50 |
| PID proportional weighting default. | |
| const float | DefKi = 0.00 |
| PID integral weighting default. | |
| const float | DefKd = 0.15 |
| PID derivative weighting default. | |
| const uint16_t | PID_PERIOD = 250 |
| PID calculation period in ms. | |
| const uint16_t | MS_PER_SEC = 1000 |
| number of ms in 1 second | |
| const float | PID_FREQ = ((float)MS_PER_SEC / (float)PID_PERIOD) |
| whole divisor is better | |
| const uint16_t | EEPROM_ADDR = 1023 |
| EEPROM config data ENDS at this address (ie saved below addr) | |
| const uint8_t | SIG [2] = { 0xaa, 0x33 } |
| EEPROM config signature bytes. | |
Header file for MD_SmartCar library hardware related parameters.