|
Smart Car Controller
1.0
Library to manage a two wheeled robotic vehicle (DC Motors)
|
|
Smart Car Controller
1.0
Library to manage a two wheeled robotic vehicle (DC Motors)
|
Main header file and class definition for the MD_SmartCar library. More...
#include <Arduino.h>#include <SC_HardwareDefs.h>#include <SC_DCMotor.h>#include <SC_MotorEncoder.h>#include <SC_PID.h>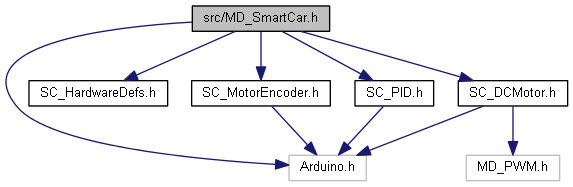

Classes | |
| class | MD_SmartCar |
| struct | MD_SmartCar::actionItem_t |
Macros | |
| #define | PID_TUNE 1 |
| set to 1 for specific PID tuning output | |
| #define | SCDEBUG 0 |
| set to 1 for general debug output | |
| #define | SCPRINT(s, v) |
| #define | SCPRINTX(s, v) |
| #define | SCPRINTS(s) |
| #define | P_PID_HDR do { Serial.print(F("{")); } while (false) |
| #define | P_PID_BODY(SP, CV, CO, last) |
| #define | P_PID_TAIL do { Serial.print(F(",")); Serial.print(millis()); Serial.print(F("}\n")); } while (false) |
| #define | ARRAY_SIZE(a) (sizeof(a)/sizeof((a)[0])) |
Main header file and class definition for the MD_SmartCar library.
| #define P_PID_BODY | ( | SP, | |
| CV, | |||
| CO, | |||
| last | |||
| ) |